Microrobotics
Development and control of mobile microrobotic systems is a central focus of our research at MSL. Microscale robotic systems have tremendous applications in areas such as biomedicine, surveillance, self-healing and self-organising structures, or microassembly. We define microrobotics as untethered mobile robotic devices that will fit within a 1 mm x 1 mm x 1mm volume (i.e. each dimension is most conveniently measured in micrometers). The microrobots we use in our lab are all are all less than 500 µm on each side. Our areas of research focus include development of novel microrobotic platforms and system, multi-microrobot control, microscale self-assembly, and flying (aerial) microrobots.
Selected Recent Publications:
R. Majumdar and I. Paprotny, “Configurable Post-Release Stress-Engineering of Surface Micro-Machined MEMS Structures,” in Journal of Microelectromechanical Systems (J.MEMS), 2017 26(3), pp: 671-678. DOI: 10.1109/JMEMS.2017.2689679
I. Paprotny and S. Bergrbreiter, “Small-Scale Robotics : An Introduction.” in Small-Scale Robotics. From Nano-to-Millimeter-Sized Robotic Systems and Applications. Springer Verlag, pp. 1 – 15, 2014
Stress-engineered MEMS Microrobots (MicroStressBots)
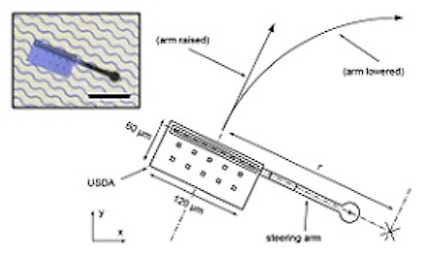
Our MicroStressBots are approximately 240 µm x 60 µm x 10 µm in size (i.e. they would comfortably rest on a slice of a human hair) and represent one of the smallest mobile robotic systems in the world. MicroStressBots are also currently the only microrobotic system that contain on-board memory and can be commanded to turn (as opposed top using a global field to position the robot). We use this unique microbotic platform to improve our understanding regarding design and control multi-microrobotic systems. We are currently developing novel algorithms enabling simultaneous control of large numbers of mobile microrobots.
Researchers:
- John Sabino
Selected Recent Publications:
- Paprotny, I., M. Zefran, and R. Majumdar, “Controlling Large Microrobot Swarms using On-Board Physics-based State Storage : New Paradigm for Multi-Microrobot Control.”, in the IEEE International Conference on Robotics and Automation (ICRA 2018) Workshop: 30 Years of Small-scale Robotics, Brisbane, QLD, Australia, May 26th 2018.
- R. Majumdar and I. Paprotny, “Configurable Post-Release Stress-Engineering of Surface Micro-Machined MEMS Structures,” in Journal of Microelectromechanical Systems (J.MEMS), 2017 26(3), pp: 671-678. DOI: 10.1109/JMEMS.2017.2689679
- R. Majumdar, V. Foroutan, I. Paprotny. “Tactile sensing and compliance in MicroStressBot assemblies,” Proc. SPIE 9116, Next-Generation Robots and Systems, 911604, 2014.
- C. G. Levey, I. Paprotny, B. R. Donald “MicroStressBots: Species Differentiation in Surface Micromachined Microrobots.” in Small-Scale Robotics. From Nano-to-Millimeter-Sized Robotic Systems and Applications. Springer Verlag, pp. 66 – 80, 2014.
- Donald, B. R., C. Levey, I. Paprotny, and D. Rus. Planning and Control for Microassembly using Stress-engineered MEMS Microrobots. International Journal of Robotics Research (IJRR), 2013, 32(2): 218-246.
Microscale Aerial Robots (MicroFliers)
We are researching untethered aerial (flying) microrobots robots. We envision these devices to soar akin to controllable (steerable) specs of dust floating through the air. The applications include, among other, surveillance, distributed remote imaging, microassembly, and chemical analysis. We have demonstrated untethered microscale flight of 300 µm x 300 µm sized stress-engineered microfliers. We are currently exploring stability and control as well as biomimetic propulsion for microscale flying robots.
Researchers:
- Jennifer Smith
Selected Recent Publications:
S. A. Hussain, A. Klitzke, R. Majumdar, and I. Paprotny, “Analysis and Experimental Results of Untethered Flight of Stereolithographically Printed MEMS Microfliers.”, in the Technical Digest of the Hilton Head Workshop 2016: A Solid-State Sensors, Actuators and Microsystems Workshop, June 2016
S. Ward, V. Foroutan, R. Majumdar, O. Mahdavipour, S. A. Hussain, and I. Paprotny, “Towards Microscale Flight: Fabrication, Stability Analysis, and Initial Flight Experiments for 300 µm × 300 µm Sized Untethered Microfliers,” IEEE Transactions on Nanobioscience, 14(3), 2015: 323 – 331.
Novel MEMS Fabrication Techniques
We investigate novel microfabrication techniques that allow us to create increasingly complex microstructures. These techniques complement standard MEMS fabrication methods, and include stress-engineering MEMS, two-photon stereolithography, multi-wafer bonding, and printed microscale epoxy bonding. In addition, our we research ways of manipulating, aligning, and docking of microscale structures.
Researchers:
- Ratul Majumdar
Selected Recent Publications:
- R. Majumdar and I. Paprotny, “Configurable Post-Release Stress-Engineering of Surface Micro-Machined MEMS Structures,” in Journal of Microelectromechanical Systems (J.MEMS), 2017 26(3), pp: 671-678. DOI: 10.1109/JMEMS.2017.2689679
- R. Majumdar, V. Foroutan, and I. Paprotny, “Post-Release Stress-Engineering of Surface-Micromachined MEMS Structures Using Evaporated Chromium and In-Situ Fabricated Reconfigurable Shadow Masks.” in Proc. 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2015), Estoril, Portugal.
Distributed Low-Power Wireless Sensing Networks
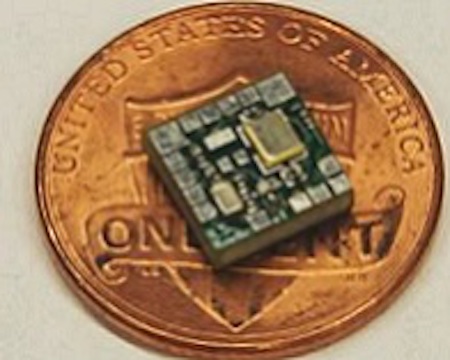
We are researching low-power wireless sensor networks, specifically focusing on energy systems sensing and biomedical applications. We are fabricating systems where each node of the network consumes so little power that it can potentially harvest enough energy for its operation from the surrounding environment. We are interested in solving challenges associated with reliable operation and co-location of such a low-power wireless network.
Researchers:
- Nick Iliev
Selected Recent Publications:
- V. Sudula and I. Paprotny. “WI-PATCH: Stick-On Wireless Sensor Platform for Continuous Monitoring of Human Physiology,” In Proc. 7th Int. Conference on Pervasive Technologies Related to Assistive Environments, 2014, Rhodes, Greece, May 27 – 30, 2014.
- D S Nguyen, I Paprotny, P Wright, R White, “MEMS capacitive flow sensor for natural gas pipelines,” Sensors and Actuators A: Physical, Oct 2014.
- Send, R., Q. Xu, W. Ku, I. Paprotny, R.M. White, P.K. Wright. “Granular Radio EnErgy-sensing Node (GREEN): A 0.53 cm3 wireless stick-one node for non-intrusive energy monitoring,” the 12th Annual IEEE Conference on Sensors (IEEE SENSORS 2013), Baltimore, MD. (podium presentation)